线性代数自用超基础笔记
本文最后更新于:2022年7月21日 下午
线性代数自用超基础笔记
大学课堂上怎么可能听得懂(笑),跟着3Blue1Brown大神学吧!笔记可能不严谨,慎看!
向量是什么?
是一个原点在,终点在的箭头。
是一个原点在,终点在的箭头。
向量可以相加、可以乘常数,表示这个箭头的变化。
单个向量看做箭头比较合适
多个向量看做点比较合适
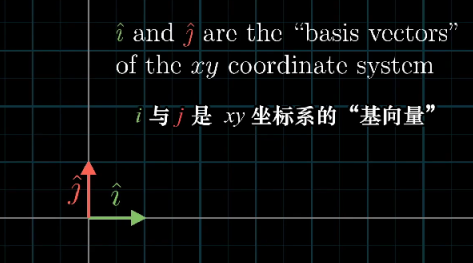
基向量
二维空间中有两个特殊的向量,叫做基向量(basis vectors)。其它向量也可以表示成基向量乘常数然后相加,比如是乘常数-2,乘常数3之后相加。
线性相关 线性无关
那假如我们选择另外两个向量当做基向量呢?显然,只要选择两个线性无关(Linearly independent)(不共线)的向量作为基向量,那就可以张成一个二维空间。假如线性相关(Linearly dependent),那就只能张成一条直线。更高维的空间同理。
矩阵乘法与线性变换(Linear Transformation)
“变换”类似于一个“函数”,输入进一个向量,输出一个向量,而用“变换”这一次的原因是需要我们从运动的角度看待,即输入向量运动到输出向量上。而考虑整个变换,则要考虑空间内所有向量经过变换后到达对应的另一个向量。
而线性变换指的是直线在变换之后仍然是直线,且原点固定。
如何表示线性变换呢?只需要记录两个基向量变换后的位置就行。下面是一个例子,其中变换到了,而变换到了。我们通常用矩阵来表示:。
而矩阵乘法就能表示对某一个向量进行线性变换:
行列式
既然矩阵能变换空间,我们来关注一下面积的变化:原空间中面积为1的区域变换后的面积就叫做行列式(determinant)。当变换后面积为0时,变换后的基肯定是线性相关的了。当变换的面积是负数时,其实是把空间翻了个面。
2x2的行列式很好算,就是左上乘右下减去右上成左下。
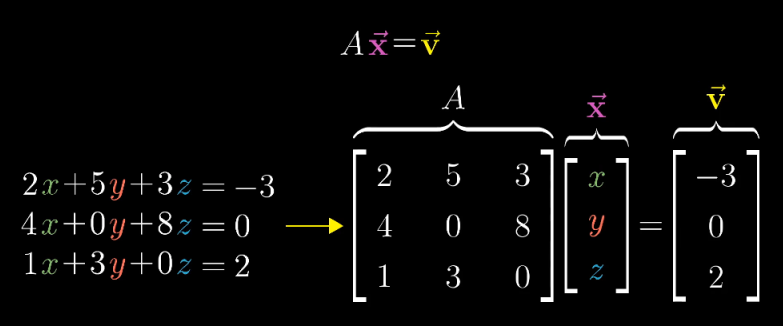
线性方程组与矩阵
线性方程组可以按照下面的方式写成矩阵,要求解就是找到一个向量,使用变换后能变到上。
逆矩阵(inverse)
既然矩阵能让变换到,那也会有另一个矩阵让变换到,即,这就是矩阵的逆。
显而易见,,先变过去再变回来还是原来的基向量。
矩阵的逆存在的条件是行列式不为零,因为被压缩成直线以后不能在变回来。
秩(Rank)
一个矩阵变换后空间的维数
基变换 相似矩阵
现在有两个空间,我们可以用矩阵乘来将A空间的向量转换到B空间,但假如我想对A空间进行一个变换(旋转90°),那我要怎么得到这个变换在B空间的表示呢?
假设是我想要表示的变换,而能够让一个向量从A空间变换到B空间,那么在B空间的表示为:。
而且,和是相似矩阵。
特征值 特征向量(Eigenvalue Eigenvector)
某个矩阵满足时,是特征向量,是特征值。
也就是说这个矩阵对向量变换后,不改变方向,只改变长度到倍。
解法就是移项到左边,默认特征向量不为0,那么就是求让特征向量在变换后是零向量的矩阵,即。
特别的,对角矩阵的对角元就是特征值。
特征值分解
结合基变换,我们可以对相似矩阵进行特征值分解。一个线性变换可以看作是旋转+拉伸,特征值分解就是把旋转和拉伸分开。对于某个矩阵,分解成
其中P是表示旋转变换(基变换),且列向量是单位化的特征向量。而是对角矩阵,表示拉伸变换,对角元是特征值。
其实反过来就是$P^{-1}AP=\Lambda $,就是当前这个矩阵在另一个对基向量表示的空间下是对角矩阵。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!