数字图像处理复习笔记
本文最后更新于:2022年7月21日 下午
数字图像处理复习笔记
[TOC]
第一章 绪论
数字图像是一个被采样和量化后的二维函数,其中,都是有限的和离散的。
数字图像也可看做是一个二维矩阵,行列划分后,每个小块区域叫做像素,每个像素一般由一个0到255的数值表示(灰度图)或者由多个0到255的数值表示(彩色图像)。
为什么是0~255?因为
数字图像的来源
- 伽马射线成像:用于核医学和天文观测
- X射线成像:用于医学、工业、天文
- 紫外波段成像:荧光显微法
- 可见光成像:最常见的
- 红外波段成像:用于海岸线测绘、矿物测绘、土壤温度测绘、土壤含水量测绘
- 微波波段成像:雷达图像,可以不被云层阻挡
- 无线电波段成像:核磁共振成像MRI
- 声波成像:医学超声波
- 计算机生成图像
数字图像的特点是什么?
- 信息量大
- 像素之间相关性较大、冗余较多
- 对三维景物的理解,使用单个视角二维图像不够
- 二维图像的观察受人的主观因素较大
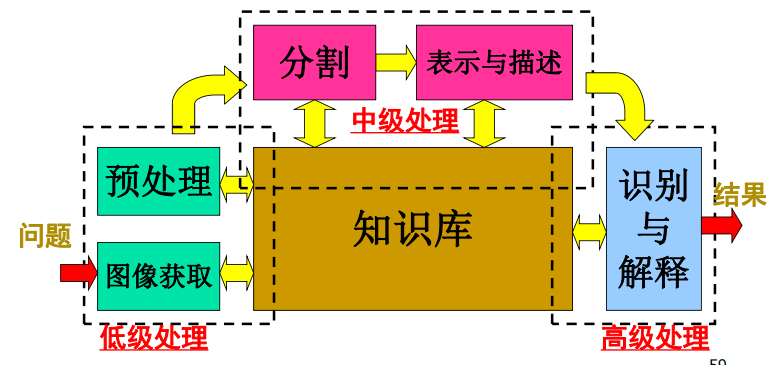
数字图像处理是什么?
- 狭义上指图像->图像,即通过处理把一副图像变为修改后的另一幅图像。
- 广义上也指图像->非图像,即理解分析一副数字图像。
第二章 数字图像基础
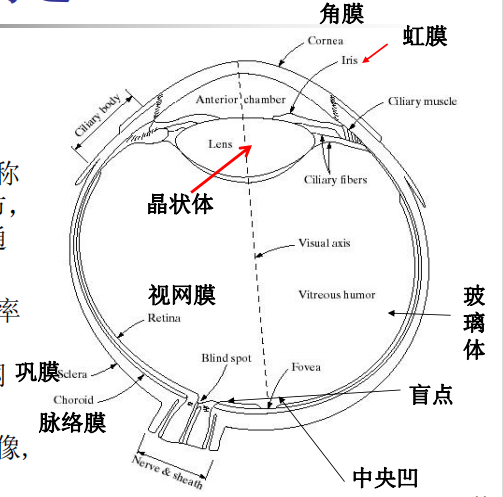
人类视觉感知
-
虹膜:类似光圈,控制进光亮
-
晶状体:改变焦距、聚焦图像
-
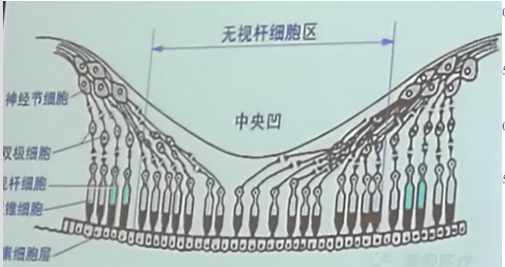
视网膜:感受图像。有锥状体和杆状体两种光感受器。
- 锥状体:数量较少,中间凹的中间部分,颜色敏感,亮视觉
- 杆状体:数量较多,分布面积大,颜色不敏感,对低照明度敏感,分辨率低,负责察觉运动,暗视觉
-
中间凹:成像芯片
graph LR
A[光信号] --> B[晶状体透镜]
B --> C[中间凹区域]
C --> D[光接收器]
D --> E[电脉冲信号]
E --> F[大脑解码]
视觉特性
-
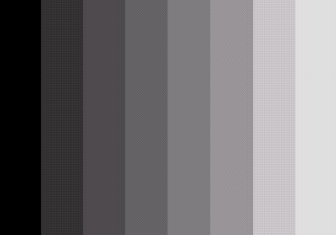
亮度适应
人能感受到的光亮度最大值与最小值之比为,随着光线亮度增加,人眼感受到的主观亮度对数增加。
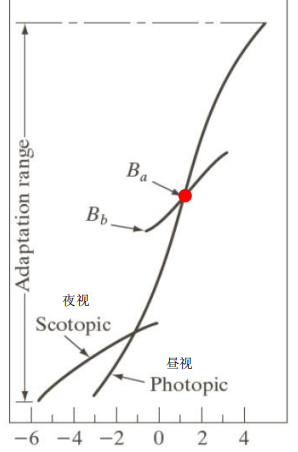
图中Scotopic和Photopic两条曲线代表杆状体和锥状体的亮度感知曲线,而红点处是指在某一个亮度下人眼能够同时分辨的亮度范围(人眼动态范围)
-
马赫带现象:边界处,主观亮度对比强。
-
同时对比现象:对于相同的亮度,背景变化时主观亮度会变化。

图像采样与量化
图像的数字化就是图像的采样和量化,采样是把空间坐标离散化,量化是把灰度离散化。
采样值决定空间分辨率(1920*1080 etc),量化值决定灰度分辨率(L级 etc)。
细节丰富的图像应该细采样、粗量化,避免模糊;缓变的图像应该细量化、粗采样,避免假轮廓。
图像内插
- 最近邻插值:选择最近邻点的灰度值
- 双线性插值:找到最近的4个点,进行加权平均,
- 双三次内插:找到最近的16个点
概率方法
对比度越高,图像标准差越大。
像素空间基本关系
邻域:
- 4邻域:上下左右
- 4对角邻域:左上 左下 右上 右下
- 8邻域:周围一圈
**邻接性:**若两个像素邻接,那么空间上满足4、8或D邻域;灰度上应该属于同一个灰度值集合。
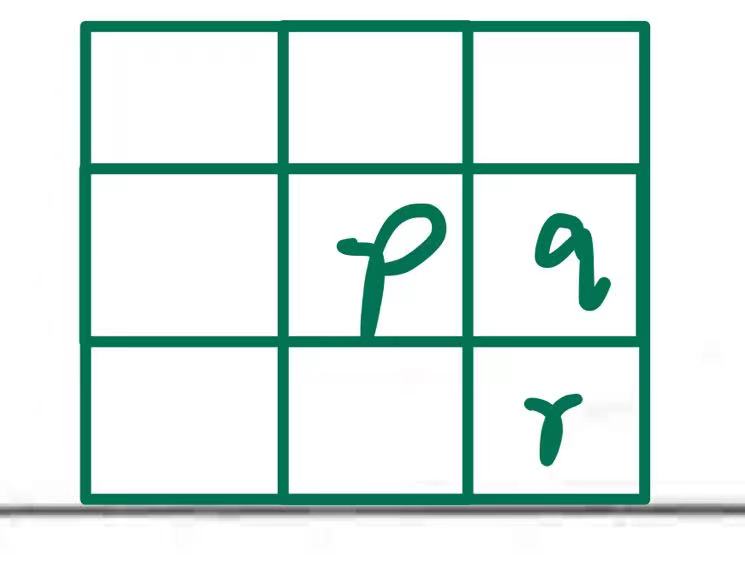
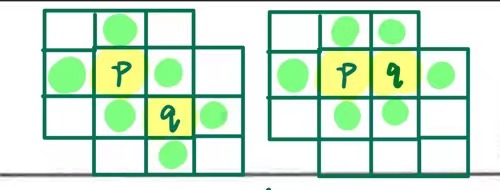
- 4邻接:若p、q位置如图且灰度相似
- 8邻接:若p、r位置如图且灰度相似
- m邻接:若q在中或者q在中,且绿色部分(4邻域)没有灰度相似的像素。
**通路:**从p到q的像素序列依次邻接,根据邻接类型定义4、8或m通路。
**连通:**定义一个集合S,若S中的p、q存在完全由S中的像素组成的通路,则p和q在S中连通。
**连通分量:**对于S中任意像素p,S中连通到p的像素集合叫做连通分量。
**连通集:**若S中仅有一个连通分量,则S叫做连通集。
**距离:**满足的函数。
- 欧氏距离,圆形
- 距离,,菱形,城市街区距离
- 距离,,方形,棋盘距离
第三章 灰度变换 空间滤波
这一章主要针对图像空间域进行操作,灰度变换就是对单个像素进行操作,而空间滤波就是针对一个邻域(常见方形)使用算子进行卷积操作,算子也可以叫做空间滤波器、核、模板、窗口。

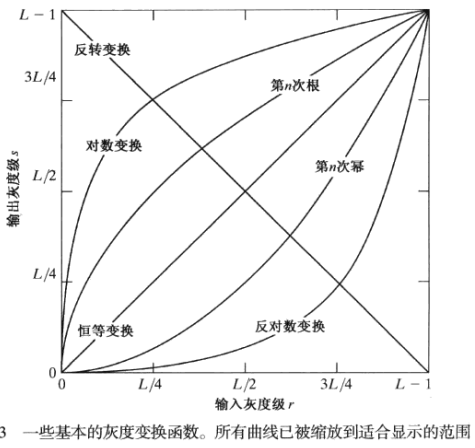
灰度变换
用表示用处理原始像素得到处理后像素。
| 名称 | 公式 | 作用 |
|---|---|---|
| 图像反转 | 黑白反转 | |
| 对数变换 | 拓展暗像素值,压缩亮像素值。常用来可视化傅里叶频谱。 | |
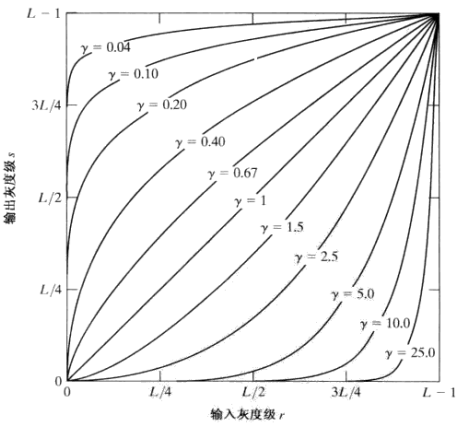
| 伽马变换 | 拓展暗像素值,压缩亮像素值。用于伽马校正,增强对比度、处理“冲淡”了的图像。 | |
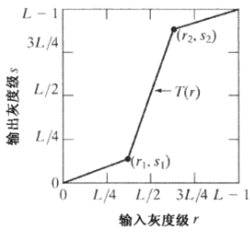
| 对比度拉伸 | 分段函数 | 手动指定曲线形状 |
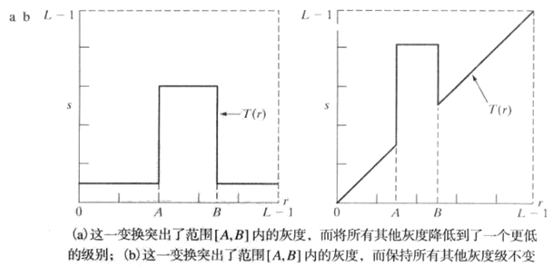
| 灰度级分层 | 分段函数 | 手动指定某一范围灰度进行调整 |
| 比特平面分层 | 分段函数 | 把256级图像看做由8个1bit平面组成的图像。然后针对每个比特平面进行处理。低阶比特平面存储细节,而高阶存储整体。 |
| 直方图均衡、直方图匹配(规定化) | 分段函数 | 在直方图的角度,均衡就是把直方图处理成近似横线,匹配就是把直方图处理成想要的形状。 |
位平面分解
用于辅助决定量化位数是否充足、图像压缩、数字水印。
直方图均衡
针对比较难的直方图均衡进行计算方法介绍(不涉及原理公式推导)
- 计算直方图
- 计算灰度分布频率。
- 计算累计灰度分布频率。
- 计算均衡后图像直方图。L为灰度层数。四舍五入累计概率×灰度最大值。
- 根据计算出的均衡直方图,将原图灰度映射到新图
直方图规定化
通过一个指定的函数产生一个特定的直方图。根据这个直方图确定一个灰度级变换。由此产生的新图像的直方图符合指定的直方图,这样的方法称为直方图匹配或直方图规定化。
局部直方图均衡化
在一个小邻域内做直方图均衡化。
直方图统计
统计图像全局均值和方差,然后统计小领域的均值和,根据这四个值来进行操作,比如:将均值较小的地方(暗区域)和方差比较低但并非完全平滑的地方(低对比度区域)提升亮度。
空间滤波
卷积操作。
| 名称 | 模版 | 作用 |
|---|---|---|
| 线性平滑 | 平滑 | |
| 高斯线性平滑 | 加权平均,平滑 | |
| 统计排序(非线性)平滑 | 取中值 | 去掉椒盐噪声效果好(但是可能改变图像的性质,一般不用于医学图像处理) |
| 拉普拉斯锐化 | 微分算子,锐化边缘(需要加原图像) | |
| 加对角线的版本 | ||
| 非锐化掩蔽、高提升滤波 | 无 | 印刷和出版业常用 |
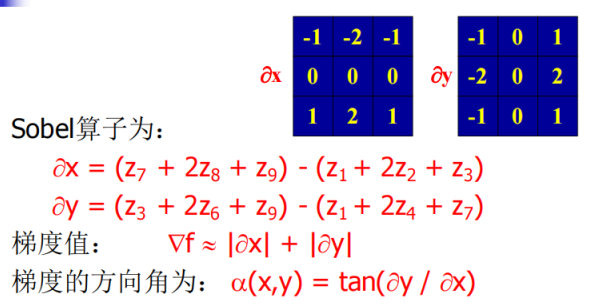
| Sobel锐化 | x方向的一阶微分(需要加原图像) | |
| y方向的版本 | ||
| 斜着的版本,朝着另一个方向斜也可以 |
拉普拉斯锐化
特点是模板所有数字和是0,这样是为了在平滑区域不改变。假如某个3x3区域全是1,那么计算之后的微分就是0。
拉普拉斯锐化后的结果是微分,需要和原图像相加或者相减(取决于中心是正数还是负数)。
拉普拉斯加上对角线是为了保证旋转不变性。
Sobel锐化
同样,所有数字和是0,使用的是一阶微分。0线的方向就是锐化的方向。权重2是为了平滑图像。
(注意下面和右边是正数)
一般使用x方向和y方向的绝对值之和作为梯度,此时非线性。
非锐化屏蔽
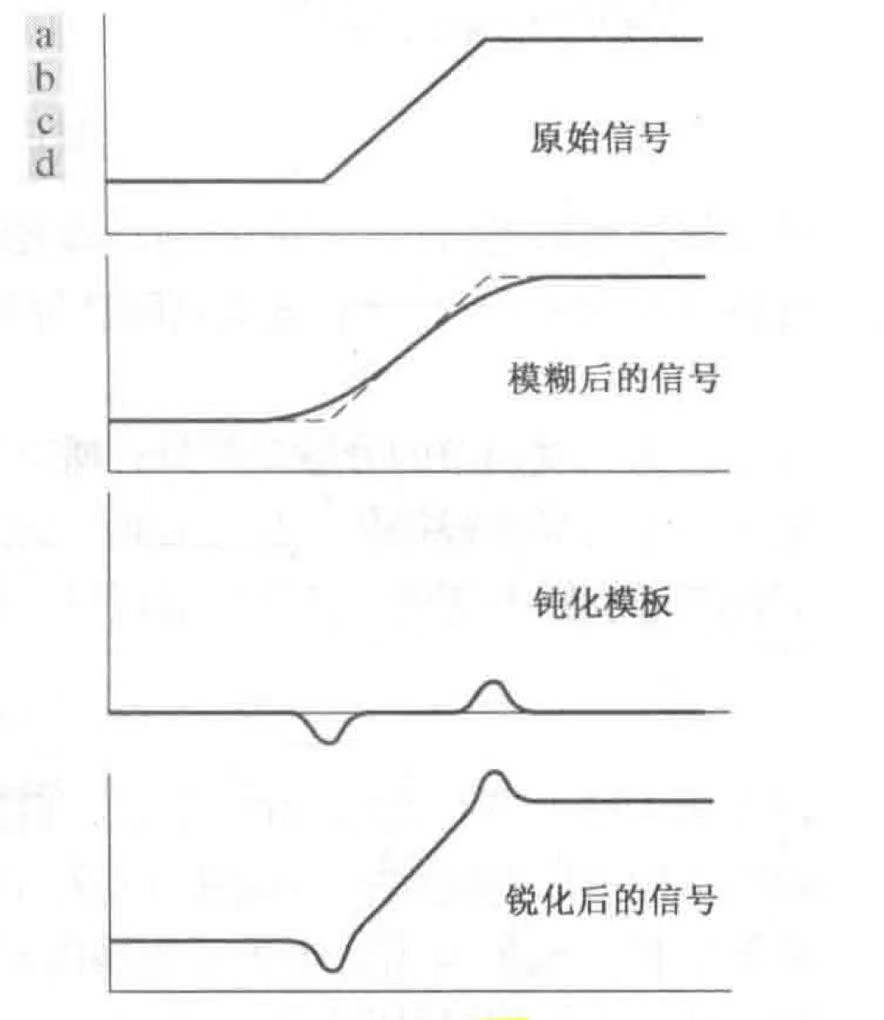
如图,原始信号模糊之后,再减去模糊信号能获得钝化模板。就是原始图像减去模糊图像得到被模糊掉的信号,然后把这个信号乘常数加回到原信号。
第四章 频率域滤波
就是通过傅里叶变换把图像从空域变换到频域进行处理。
频域和时域通过卷积操作相通,但是根据信号与系统的规律,我们之前用的有限的时域卷积核对应着无限大的频域,而这一章从频域的角度使用有限的频域卷积核,对应着无限大的时域卷积核。
低通滤波器用来平滑图像,高通滤波器用来锐化图像。
| 名称 | 公式(是截止频率) | 作用 |
|---|---|---|
| 理想低通滤波 ILPF | 强行截断频域的高频信号,会产生振铃效应 |
|
| 布特沃斯低通BLPF | n是阶数,越高越快从1到0 | |
| 高斯低通滤波GLPF | ||
| 理想高通滤波 IHPF | ||
| 布特沃斯高通BHPF | ||
| 高斯高通滤波GHPF | ||
| 同态滤波 | 本来GHPF是0->1,然后压缩到然后再上移。通过c来控制锐利程度。 | |
| 带阻滤波器 | 用代替,高斯exp括号内的2忽略。 | 能够有效去除周期噪声 |
| 带通滤波器 | 1-带阻滤波器 |
高频强调滤波器
控制高频贡献,控制原点偏移量,使零频率不被过滤。
同态滤波
同态滤波的思想就是把图像的照射分量和反射分量分开处理。照射分量就是光照在某个物体上的强度,而反射分量更接近与反射系数,值域为,表示光在某个物体上的反射强度。
“同态”指的是特殊的映射,比如,有,把原本的加法映射成乘法。
-
图像建模为,使用对数操作转换成相加,这一步就是“同态”的关键。
-
然后就可以用傅里叶变换了。把上式记作,则用可以用滤波器进行处理。
-
对于和,低频成分通常与照射光有关,而高频成分与反射相联系,所以使用修改过后的高斯高通滤波器作为。之后就傅里叶反变换回去。再通过取指数把加法转换回乘法。
第五章 图像复原与重建
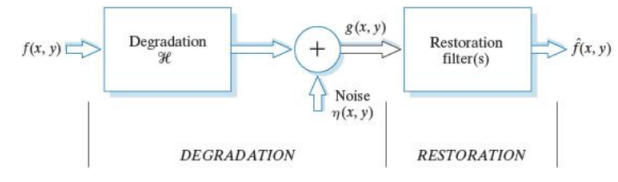
是退化图像。
图像复原与图像增强的区别
图像复原是客观过程,识图恢复图像原来的面貌,有客观的测量方法;而图像增强使从主观视觉角度改善图像质量,为了人类视觉而进行优化。
图像噪声是什么?
图像噪声指造成图像失真、质量下降的图像信号,主要来源于图像的获取和传输过程。噪声根据统计特性可以分为周期噪声和随机噪声,还可能有空间特性(相关性)或者频率特性。随机噪声可以用概率密度函数(PDF)来建模,有高斯噪声、瑞利噪声、伽马噪声等。**脉冲噪声(椒盐噪声)**指的是数字化最大值或最小值的噪声。
| 名称 | 模版 / 公式 | 作用 |
|---|---|---|
| 算术均值滤波器 | 平滑图像来降低噪声,但是不抗椒盐噪声 | |
| 几何均值滤波器 | 或者 | 丢失的细节更少,但是不抗椒盐噪声 |
| 谐波均值滤波器 | 处理高斯噪声和盐噪声,不抗椒噪声 | |
| 逆谐波均值滤波器 | 抗椒,抗盐,就是算术均值,就是谐波均值。 | |
| 中值滤波器 | 找中值 | 抗椒盐噪声 |
| 最大值/最小值/中点滤波器 | 找最大值、最小值、最大值与最小值的平均 | 前两者只抗椒盐噪声中的一种,而后者处理高斯和均匀噪声 |
| 修正后阿尔法均值滤波器 | 把最大最小值去掉再求平均,去掉的值数量为 | 高斯噪声和椒盐噪声混合 |
| 自适应局部降低噪声滤波器 | 是噪声方差,需要估计。剩下两个是局部的方差和均值。需要避免第二项是负值。 | |
| 自适应中值滤波器 | 见下 | 能够比传统中值滤波器处理概率更大的椒盐噪声 |
| 陷波滤波器 | 见下 | 最有用的选择性滤波器 |
自适应局部降噪滤波器
噪声方差为0的时候返回原图像,噪声方差>=图像方差时取算术均值。
自适应中值滤波器
- 选择窗口,找到中值,假如中值不符合,则扩大窗口再选中值,直到窗口大小到达规定的。
- 找到中值之后,判断窗口中心点符不符合,假如符合就不变,不符合就改成之前找到的中值。
假如噪声密度比较小,那么窗口就不会开太大,能够保留细节。
陷波滤波器
陷波滤波器必须是对称的。特殊的,位于原点处时是低通/高通滤波器。
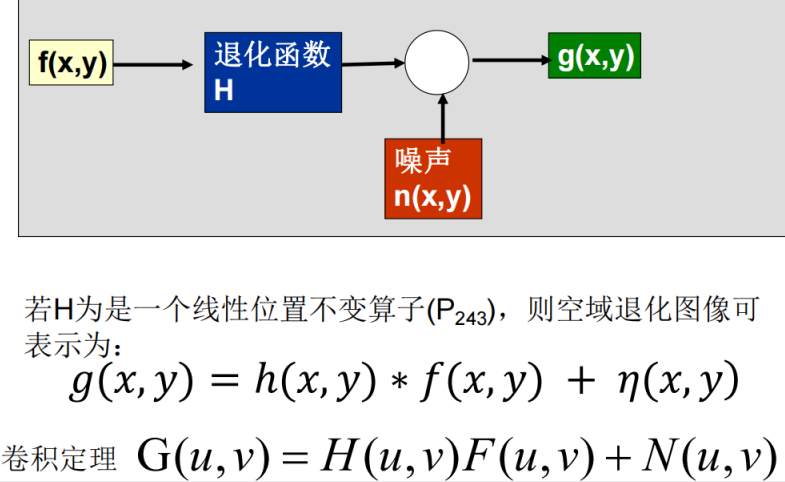
退化模型
假设退化模型是线性不变的,那么受损图像,从时域可以看作是,从频域可以看作是
进行图像复原的关键是获得。获取可以基于实验法、观察法、数学建模法。
逆滤波
获取之后,假设,那么做逆滤波。但是当很小时,会很大,逆滤波复原会不稳定。
维纳滤波
目标:寻找一个滤波器使得滤波后图像与原图像的MSE最小。维纳滤波器假定图像与噪声均为平稳随机过程
其中是噪声功率谱,是原始图像功率谱,常用常数代替。
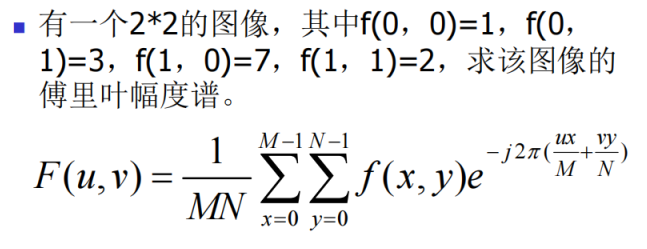
求二维傅里叶幅度

第六章 彩色图像处理
彩色模型
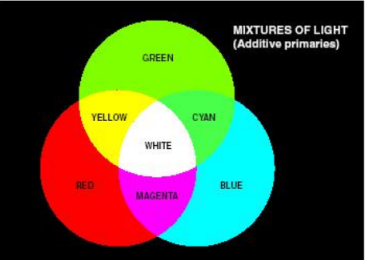
RGB
从光的三原色得出了RGB色彩模式(加色模式)
CMY(K)
从原色相加的二次色得出了CMY(K)色彩模式(减色模式)。
HSI
但是人最直观的彩色模型是HSI(色调、饱和度、亮度),通常所说的色度是色调和饱和度的统称。HSI指的是Hue, Saturation, Intensity,其中I就是RGB的平均值。
YUV
用于PAL制式的彩色电视信号传输,是RGB的加权平均数,。
YCbCr
JPEG使用的彩色空间,Y和YUV一样,而Cb是U乘一个常数,Cr是V乘一个常数。
伪彩色
由于人眼对彩色的识别度更高,所以常将黑白照片根据灰度级人工分层成不同的颜色。
全彩色图像处理
- 可以分别处理每一个分量
- 也可以统一处理是三个分量
- 也可以只处理一个分量(比如调整亮度分量,做直方图均衡;或者把饱和度分量提高,增强对比度)
第九章 形态学滤波
图像的形态学指的是对图像形状和结构的分析及处理,本章主要讨论二值图像。
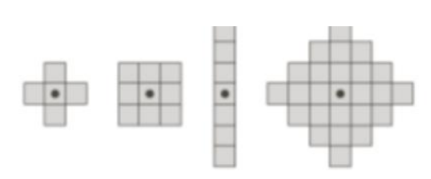
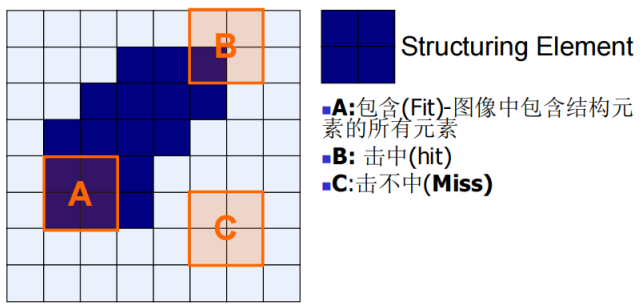
形态学滤波定义一个类似卷积核的领域,叫做结构元素Structure Element,可以是任意尺寸、任意形状,但是实际中一般填充为矩形。
逻辑运算
击中hit、击不中miss、包含fit
腐蚀erosion、膨胀dilation
腐蚀能够将图像的边界向内缩,膨胀则向外张
**腐蚀:**当结构元素(se)包含(fit)于二值图像时,中心点为1.(即进行与操作)。可以用表示。
**膨胀:**当结构元素(se)击中(hit)于二值图像时,中心点为1.(即进行或操作)。可以用表示。
腐蚀和膨胀不是一对可逆操作,但有对偶性。
开运算、闭运算
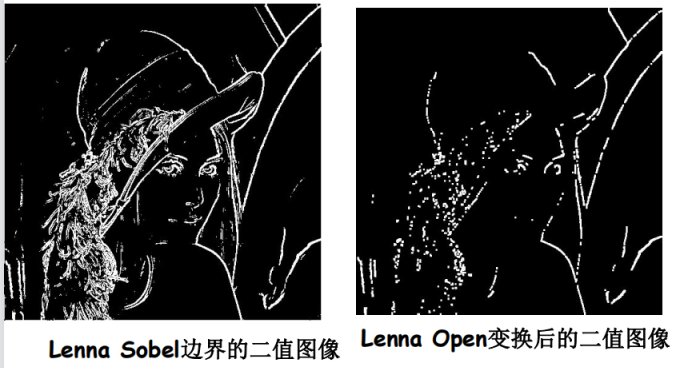
开运算即先腐蚀后膨胀,用表示。作用为区分开物体、消除细突出物、降低噪声、平滑轮廓。
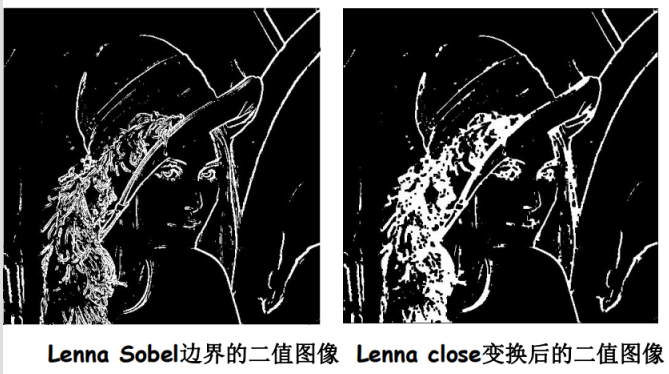
闭运算即先膨胀后腐蚀,用表示。作用为消除小孔洞、填补断裂。
应用
边界提取
先腐蚀,然后减去腐蚀。
孔洞填充
- 先选择一个在孔洞内的点集合。
- 。
- 假如,算法结束,取作为结果。
即对选取的点进行条件膨胀,用图像取反来限制。
提取连通分量
- 先选择一个在所需连通分量里的点集合
- 。
- 假如,算法结束,取作为结果。
和孔洞填充很像,直接用图像来限制。
第十章 图像分割
图像分隔技术就是把图像分隔成若干个不同的区域。一般基于区域之间亮度值的不连续性和区域内的相似性。
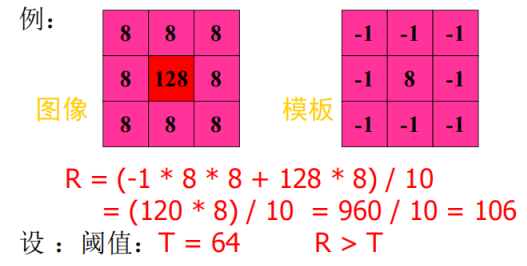
点的检测
模板和要为0,从而在平滑区域响应为0。并且设置阈值可以避免检测过于灵敏。
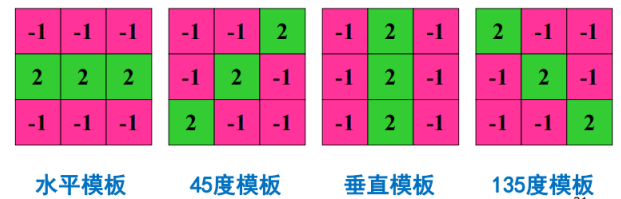
线的检测
类似的检测方法,模板系数和要为0
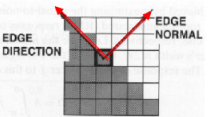
边缘检测
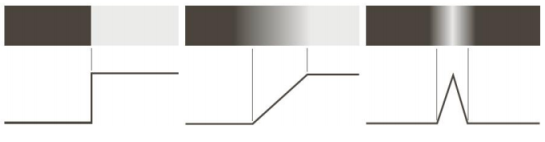
边缘可能是对象的分界处、也可能是对象内部不同材料的分界处。在边缘上有边缘法线、边缘方向如图。而边缘附近的灰度分布有下面三种。
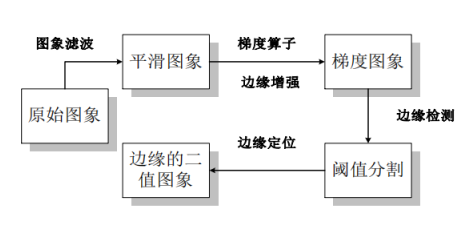
边缘检测的步骤:平滑降噪 -> 边缘点检测 -> 边缘定位
- 平滑降噪:基于导数计算,所以容易受到噪声影响,但是平滑的同时也导致边缘强度的损失。
- 边缘点检测:微分算子能够突出边缘,然后通过设置阈值来提取边缘点。
- 边缘定位:精确确定边缘的位置。从候选点集中选择真实成员。
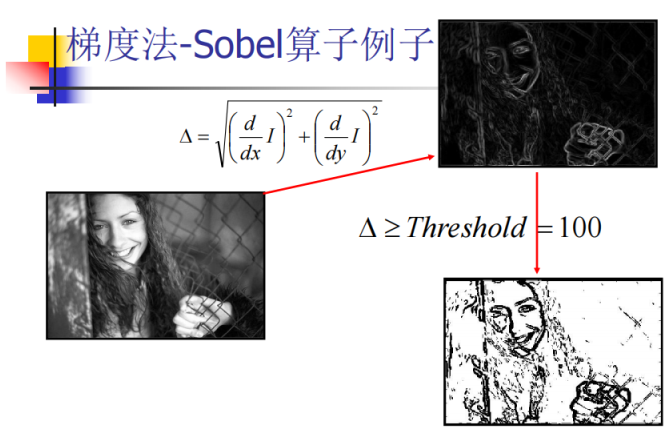
Sobel梯度法
Sobel既能提取x和y方向的微分,还有一定的平滑效果。提取出梯度之后,设置一个阈值,大于threshold的就设置为1,其余为0.
二阶导数 LoG法
二阶导数有以下优势:① 可以利用零交叉性质定位边缘,还可以确定一个像素是在暗的一边还是亮的一边。
边缘检测一般不用拉普拉斯算子的原始形式,因为①二阶导数对噪声更加敏感了;②对于一个边缘会产生两个幅值;③不能检测边缘方向。
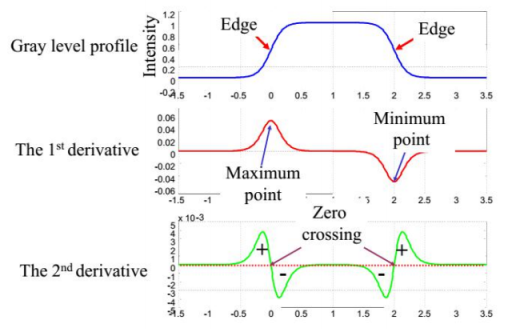
所以一般用LoG方法:
- 用高斯滤波器进行平滑降噪
- 用二阶拉普拉斯检测边缘点
- 根据二阶导数零交叉点定位边缘
所以LoG算子定义为高斯平滑的二阶导数:
然后寻找零交叉点:以p为中心的3x3邻域,比较左/右、上/下和两个对角的值,如果符号不一样且差值超过了一个阈值,那么这个点就是零交叉点。
Canny法
没说很详细,不考吧大概
- 用高斯滤波器进行平滑降噪
- 用一阶偏导的有限差分计算梯度幅值和方向
- 对梯度幅值进行非极大值抑制
- 双阈值算法和连接分析来检测并连接边缘
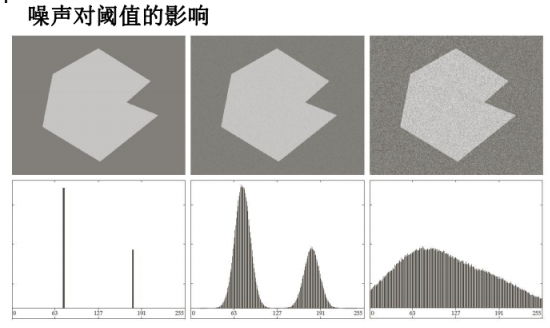
直方图阈值分割法
通过设置一个阈值,根据同一个区域的相似性进行分割。最简单的就是通过直方图找到阈值,但是会受到噪音的干扰。可以选取谷底,也可以选取两个峰值之间某个固定位置。
Isodata门限算法
- 选取门限的初值
- 用分隔图像,分成和两类像素
- 计算和的平均灰度和
- 令新门限
- 重复2-4,直至
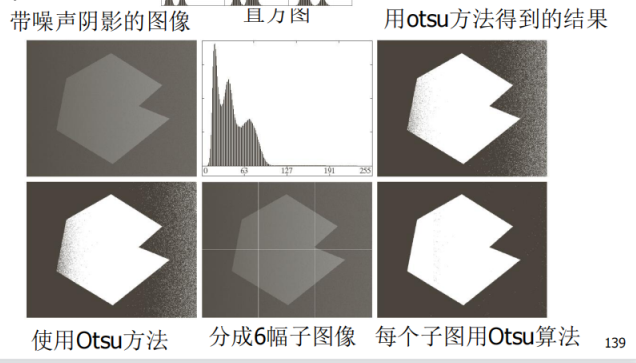
Otsu最佳全局阈值法
-
计算输入图像的归一化直方图
-
对于阈值计算像素被分类到的概率
-
对于阈值计算像素被分类到的平均灰度
-
计算整个图像的平均灰度
-
对于阈值计算类间方差
其实类间方差是由的化简得来的。
-
让最大的值就是阈值。如果不唯一,则取每个的平均。
可变阈值处理
把图像分成许多小块,然后分别用不同的门限进行分割。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!